Robotika v lékařství
| Site: | Moodle Lékařské fakulty Univerzity Karlovy v Hradci Králové |
| Course: | Robotika v lékařství |
| Book: | Robotika v lékařství |
| Printed by: | Guest user |
| Date: | Thursday, 13 November 2025, 7:15 PM |
Description
Studijní materiál by měl poskytnou základní náhled na využití robotů v medicíně.
1. Definice pojmu robot
Když se řekne robot, každý z nás si něco vybaví v hlavě, těchto představ může být nespočet. Někdo si představí humanoida, jiný robotickou paži a nebo třeba protézu.

Obr. 1: Humanoidi [1]
Každý robot by se dal ale popsat následovně: Jedná se o stroj, který je schopen pracovat s určitou mírou samostatnosti, na základě předem nastavených algoritmů. Vykonává úkony, ke kterým je určen s minimálním vlivem okolí. Potřebné údaje sleduje senzory, kterými zaznamenané hodnoty analyzuje, dle výsledků je schopen vyhodnotit následující kroky. Robot velmi často ví již několik kroků dopředu, co má udělat.

Obr.2: Robotická paže, protéza [2]
Aplikací robotů v medicíně je mnoho, s některými se setkáte v dalších kapitolách.
2. Roboti a chirurgie
Využití robotů v chirurgii je velmi žádoucí, jelikož velmi často roboti zde fungují jako prodloužené končetiny lékařů, které se neunaví, netrpí třesem a jsou schopny pracovat v velkou přesností.
Z předchozího popisu již lze snadno odvodit, že roboti se používají v minimálně invazivních zákrocích, tedy se jedná o tzv. endoskopické operace. Endoskopická robotická operace se provádí tak, že se pomocí ramen robota malými otvory do těla zavedou nástroje. Endoskopické operace byly nejprve prováděny jen s užitím endoskopických nástrojů, které u prapůvodních nástrojů byly pevné a rovné, kterými bylo možné provádět operace jen v dobře dostupných místech. Postupem času byly vyvinuty manuální i robotické nástroje s ohebnou koncovkou. Aby bylo možné s nimi v těle manipulovat je nutné dutinu břišní naplnit biologicky odbouratelným plynem tedy oxidem uhličitým. Robotická ramena jsou ovládána chirurgem za pomoci joysticků. Operované místo je snímáno kamerou s 3D snímáním a přenášeno na obrazovku.
Robotem asistované operace mají mnoho pozitivních vlastností. Jedná se o nejméně rizikové zákroky. Při provádění zákroku chirurg sleduje trojrozměrný obraz, z toho vyplývá velká přehlednost na operačním poli. Při průběhu operace robot vyhodnocuje jednotlivé pohyby, zabraňuje prudkým pohybům a neovlivňuje ho třes rukou. Jiné pohyby, které jsou vyhodnoceny jako nebezpečné mohou býti provedeny, pokud operatér potvrdí jejich provedení.
Vzhledem k malým zásahům do organismu pacienta, proto dochází ke snížení nákladů na následnou pooperační péči, jelikož se zkracuje doba hospitalizace. Snižuje se počet míst, kde by mohla vzniknout infekce. Snižuje se potřeba transfuzí a zevní jizvy se minimalizují.
Robotická chirurgie umožňuje, že lékař nemusí být ve styku s pacientem, jelikož robota je možné ovládat i z opačného konce světa. Ovládání robota probíhá a pomoci joysticku tzv. ovládacích konzolí, se kterými manipuluje operatér a sleduje obraz daného místa. Další součástí robota jsou operační konzole a přístrojová věž.
Nejužívanějším systémem pro roboticky asistované operace je systém Da Vinci, proto se také často hovoří o tzv. Da Vinci chirurgii. Robotický systém Da Vinci se skládá z výše zmiňovaných částí. Tento systém byl vyvinut americkou společností NASA. Tento systém byl vyvinut pro meziplanetární výpravy, operace vojáků v ponorkách a na letadlových lodích a na místech válečných konfliktů.

Obr. 1: Řídící konzole Da Vinci [6]

Obr. 2: Operační konzole [7]
Nácvik práce s robotem Da Vinci je vidět zde na videu na následující adrese: http://www.mojevideo.sk/video/214ad/da_vinciho_chirurgicky_robot.html
2.1. Neurochirurgie
Neurochirurgie je jednou z oblastí, kde se dají nejvíce docenit vlastnosti robotické chirurgie. Důraz je hlavně veden na přesnost, jelikož veškeré zákroky se provádějí ve velmi citlivé tkáni, v případě jejího poškození by mohlo dojít k fatálním následkům.
Pro fyzický přístup do mozku je nutné najít optimální místo, kudy by bylo možné zavést nástroje. Pro přesnou práci byl vyvinut robotický systém NeuroMate. Tento robot je schopný se pohybovat po předem naplánované trajektorii, kterou je schopen měnit dle real-time CT. První pokusy byly prováděny pouze podle stacionárních snímků, které ale nejsou optimální, jelikož nemusely odpovídat aktuální poloze pacienta.

Obr.1: NeuroMate [8]
Postupem času vzhledem ke snaze minimalizovat zásahy do organismu a zjištění, že je možné využít urychlovače na přesné ozařování vznikl přístroj Cyberknife.

Obr.2: Cyberknife [9]
Před vznikem Cyberknife byla na nádory v mozku využíván Gamma nůž, který měl zásadní nevýhodu a to jeho užití pouze na nádory mozku, to je způsobeno tím, že je založen na polosféře, která je zastoupena helmou upevněnou k hlavě pacienta. přičemž zářiče na ni upevněné jsou nasměrovány do konkrétního společného místa, tím je docíleno, že radiace je maximální v patologické oblasti a okolní tkáně jsou ozářeny minimálně. Ale jak je zmíněno výše, tento přístroj je značně neuniverzální. Postupem času byl vyvinut Cyberknife.
Cyberknife je založen na lineárním urychlovači, který vytváří ozařovací paprsek, který je směřován do patologické oblasti. Vzhledem k jeho konstrukci je možné ho užít na libovolnou část těla pacienta. Při průběhu výkonu je pacient pod neustálou kontrolou počítače, který kontroluje jeho polohu a dle ní uzpůsobuje nastavení přístroje, aby nedošlo k ozáření zdravé tkáně. Systém je schopný monitorovat i nádory, které se pohybují například v plicích a nastavit Cyberknife na ozařování nádoru s přesností 2 mm. Vzhledem k této přesnosti se jedná o přístroj vhodný pro léčbu malých nádorů v blízkosti životně důležitých orgánů.
V dnešní době dochází k rozvoji robotického systému Renaissance, která je zaměřena na operace páteře.

Obr. 3: Počítačový obraz operace s Renaissance [10]
2.2. Ortopedie
Přesnost robotických operací je výhodou nejen při operacích dutiny břišní a hlavně při neurochirurgických zákrocích. Další využití roboticky asistovaných operacích je v oblasti ortopedie. Výhodou těchto operací je vysoce přesná resekce kosti na kterou je dáván implantát, tím se zvyšuje kvalita zákroku a funkčnost implantátu.
I v ortopedii je možné provádět mini invazivní operace tzv. artroskopie. Tento zákrok je prováděn v anestezii. Do těla pacienta jsou asi centimetrovými řezy zaváděny tubusy, kterými se k operovanému kloubu přivádějí chirurgické nástroje. Obraz vnitřku kloubu je přenášen za pomoci kamery k operatérovi. Výhodou operace je minimální poškození okolních měkkých tkání a pouzdra kloubu. Je možné provádět operace kolenních, hlezenních a ramenních kloubů.
Pro operace kloubů je využíván robotický systém RoboDoc, který je propojen s chirurgickým plánovačem OrtoDoc.
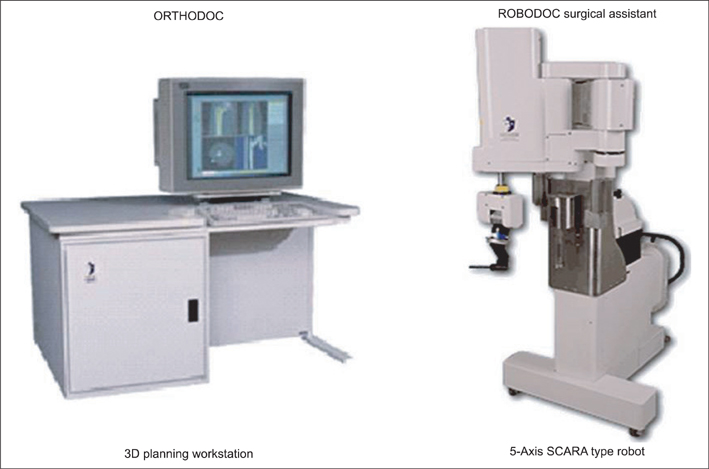
Obr. 1: Robodoc a plánovací systém Ortodoc [11]
2.3. Perkutánní
Perkutánní nebo také punkční medicína je založena na zákrocích, které nejsou dělány klasickým řezem, ale nástroje jsou do těla vedeny vpichy.
Tato metoda se velmi často používá při nemožnosti perorálního příjmu potravy. Vpichem do těla je vedena sonda, kterou je možné vpravovat potravu a potřebné látky do těla pacienta. Je nutné si ovšem dávat pozor, aby se místo nezanítilo.
Perkutánním přístupem je ale možné řešit i případy, které byly v historii velmi komplikované. Jedním z takových to případů je perkutánní implantace aortální chlopně. V historii bylo nutné provést velký řez hrudníkem, to způsobovalo nemalé komplikace jak při operaci tak při následném zotavování. Implantace chlopně a pomoci perkutánního výkonu může probíhat jak v celkové tak v lokální anestezii, to má nespornou výhodu, jelikož pacient v průběhu je schopen komunikovat a sdělovat tak lékaři veškeré pocity a problémy.
Pro tuto metodu léčby jsou v současné době schváleny dva druhy chlopní, v jednom případě se užívá přístup přes tříselnou žílu v druhém případě je proveden malý řez, aby bylo možno se dostat k srdečnímu hrotu. Chlopeň je vtlačena do místa chlopně původní a upevněna pomocí stentu.
2.4. Radiochirurgie
Radio chirurgie je zvláštní kapitolou medicíny, kde není vhodné, aby pacient a lékař byli v jedné místnosti vzhledem k působící radiaci. Proto se využívá možnosti, že robota je možné ovládat ze vzdáleného pracoviště popřípadě jen kontrolovat jeho práci.
Již v kapitole o neurochirurgii byly zmiňovány dva velmi významné radiochirurgické nástroje a to Lekselův gama nůž a CyberKnife.
Dále je možné využít tzv. X-nůž. Tento systém je založen na lineárním urychlovači a mikrokolimátoru. X-nůž na rozdíl od gama nože a CyberKnife je prakticky univerzální v použití, lze ho použít i tam, kde jiná z možností není možná. Další možností jak ho využívat je při standardní radioterapii ( ozařování ) různých druhů tumorů.

Obr. 1: X-nůž [12]
Další možností léčby tumorů je protonová terapie, která spadá do druhů ozařovacích metod.
3. Asistenční roboti
Využití robotů je možné ale nejen v laboratoři a chirurgii, ale také při rehabilitaci, polohování a dalších pomocných úkonech.
Ještě pokud se na skok vrátíme k robotické chirurgii byl vyvinut robot AEZOP 3000. Tento robot je složen z jednoho ramena s endoskopickou kamerou. Je schopný reagovat na anglické hlasové příkazy, které má od daného chirurga namluvené na kartě, pokud by nerozuměl danému slovu nic by nevykonal.

Obr. 1: AESOP 3000 [13]
Robotická zařízení je také možné využít na lůžkových odděleních hlavně u pacientů s omezenou pohyblivostí. Robot zde může zvedat či jinak přidržovat pacienta a pomáhat s jeho polohováním.

Obr. 2: Model asistenčního robota při držení pacienta [14]
Další možností asistenčního robota je robot rehabilitační, ten má velké uplatnění při stavech po mozkové příhodě či po jiných traumatech organismu. Při cévní mozkové příhodě je nutné, aby k rekonvalescenci došlo v co nejkratším časovém intervalu po dané atace, jelikož je nutné obnovit daná nervová spojení, aby mohlo dojít k co nejrychlejšímu návratu do běžného života.

Obr. 2: Rehabilitace po cévní mozkové příhodě [15]
Nejen po mozkové příhodě je nutné vytvářet mozkové spoje a obnovovat je, ale také při onemocněních nervového systému, jako je například dětská mozková obrna. Pacienti s touto diagnozou je možné postupem času plnohodnotně ovládat své tělo, ale je nutné s rehabilitací začít již od dětství, kdy dochází k tělesnému rozvoji. Bohužel ale není možné touto cestou postupovat vždy, je nutný určitý mentální vývoj a vhodné fyzické vlastnosti ( omezená výška a váha ). Podpůrné systémy mohou mít různý vzhled a funkční vlastnosti. Jedna z možností je i tzv. exoskelet. Ten zajišťuje oporu tělu a může pomoci invalidnímu chodit, ale stejně tak může být využit pro posílení organismu například při tahání těžkých břemen.

Obr. 4: Rehabilitační robot LOKOMAT [16]
Nespornou výhodou rehabilitačních nástrojů spojených s počítačem je skutečnost, že veškeré aktivity mohou být prováděny hrou. A tedy pacienta více baví a povzbuzují ve zlepšování.
V neposlední řadě je možné, aby robot zastupoval v čekárnách a na chodbách jistou část lékařského personálu, který by kontroloval dění, zjišťoval od pacientů s jakým problémem přicházejí do nemocnice a popřípadě nahrazoval jistou sociální interakci.
Asi nejnáročnější a nejvíce zkoumané jsou v dnešní době asistenční roboti řízené za pomoci EEG. Pacientovi je kontinuálně monitorováno EEG, za pomoci kterého robot vyhodnocuje co má vykonat. V praxi dochází k tomu, že již v dřívějších dobách bylo zkoumáno jak se na záznamu projevují jednotlivé úkony a na jejich základu byl navržen program, který udává robotovi co má vykonat. V praxi si snadno můžeme představit, že by se jednalo o určité rameno, prakticky inteligentní protézu, která by se pohybovala dle naší vůle. Postupem času by mělo být možné navrhnout konstrukci a rozšířit program natolik, aby zvládal veškeré úkony.
4. Robotické protézy
Různé druhy protetik doprovázejí člověka již stovky let. Kdysi ale byly velmi nepraktické, prakticky jen částečně zajišťovali to co zvládala původní končetina a většina vlastností byla ztracena.

Obr. 1: Nejstarší protetika [17]
Tak tomu bylo ještě do nedávna, ačkoli pohodlnost užívání protetik, jejich materiály a další vlastnosti se ale moc dál nepohybovali, dokud nebylo docíleno určité úrovně elektroniky a obecně předmětu biomechanotroniky.
V současné době je nejvýznamnější rozvoj nastává v oblasti vývoje robotických končetin a to konkrétně rukou. Které mají pro člověka velmi významný vliv na jeho život.
Robotické protézy je možné ovládat několika způsoby. Jednou z možností je již v minulé kapitole zmiňované EEG. Kdy elektrody připevněné k hlavě člověka snímají aktivitu mozku a na základě jejich vyhodnocení dochází k pohybu končetiny. Tato možnost ale není nejvhodnější, jelikož vzhledem k mozkové činnosti je zaznamenáváno velmi mnoho údajů, které mohou zkreslovat danou informaci. Také pohyby kabelů mohou vyvolat narušení spojení mezi elektrodou a daným snímaným místem popřípadě vytvořit nežádoucí šum.

Obr.2: Protéza řízená pomocí EEG [18]
Další možnosti je snímaní kontrakcí svalů, to je vhodné například při amputaci v oblasti kolem zápěstí. Svalové kontrakce jsou snímány elektrodami umístěnými ke svalu. Ty je nutné vždy umístit tak, abychom měli referenční, aktivní a zemnící elektrodu, vůči kterým hodnoty měříme. Ovšem sledování svalů nedokáže poskytnout informaci o pohybech prstů ale pouze o otevření a sevření zapěstí popřípadě otáčení ruky. Tyto informace by nám mohlo poskytnout napojení na nervy dané končetiny.

Obr.3: Vizualizace možnosti napojení elektrod [19]
Postupným vývojem elektroniky a jejím propojení s medicínou bylo dosaženo stavu, kdy je možné při vhodné technologii a zručnosti lékařů snímací zařízení napojovat přímo na nervy. Při snímání nervů jsou získávány jednotlivé signály, které za pomoci řídící jednotky jsou analyzovány a uvádějí do chodu jednotlivé motorky ovládající končetinu.

Obr. 4: Znázornění na napojení nervy ve svalech [20]
Prvním krokem bylo vytvořit končetinu, kterou by bylo možné ovládat. Následným krokem by bylo možné navracet lidem ztracený smysl. Pokud končetinu vybavíme vhodnými senzory tlaku a teploty, je možné poskytovat člověku zpětnou informaci o objektu, kterého se dotýká. To nelze hned a nikterak snadno. Práce s novou protézou je nutno naučit a získat cit a zjistit jak vypadají nové informace z ní získávané a hlavně je nutné, aby se mozek naučil s nimi pracovat. Zkušenost ukazuje, že naučit se zacházet s danou protézou je poměrně rychlé. Více informací o daných projektech naleznete zde: http://www2.engr.arizona.edu/~bme517/Prosthetics%20Reinnervation%20Paper.pdf

Obr. 5: Robotická protéza [21]
5. Laboratorní roboti
Ačkoli užívání robotů v laboratoři není až tak fascinující jako v jiných oblastech, je velmi důležité. Veškeré testování vzorků je nesrovnatelně rychlejší a přesnější.

Obr. 1: ISE analyzátor - LabMark [3]
Neméně důležitým faktem je ale skutečnost, že při testování dochází k práci s nebezpečným materiálem, který by mohl nakazit při nevhodné manipulaci personál. Laboratorní roboti jsou schopni provádět několik testů paralelně. Paralelní testování umožňuje zkrácení doby trvání testování a tedy je snížena náročnost na personál.

Obr. 2: Automatická pipetovací stanice LabMark[4]
Přístroje je možné nejen na přesné nabírání vzorků, ale také na jejich kultivaci, analýzu a popřípadě sledování a záznam.

Obr. 3: Termomixer LabMark [5]
6. Zdroje
[2] http://www.armadninoviny.cz/ztrata-koncetiny-nemusi-byt-konec-roboticke-ruce-nastupuji.html
[3] http://www.labmark.cz/chloridometry-ise-analyzatory/easylyte/
[4] http://www.labmark.cz/pipetovaci-stanice/automaticke-pipetovaci-stanice-epmotion/
[5] http://www.labmark.cz/h5000-hc-e
[6] http://www.medicalstaygroup.com/da-vinci-surgical-robot/
[7] http://www.medicalstaygroup.com/da-vinci-surgical-robot/
[9] http://www.multicare.org/ckr-what-diagram/
[10] http://www.sandiegometro.com/2015/05/daily-business-report-may-6-2015/
[11] http://www.ecios.org/search.php?where=aview&id=10.4055/cios.2013.5.1.1&code=0157CIOS&vmode=PUBREADER
[15] http://magazin.ceskenoviny.cz/zdravi/index_img.php?id=332557
[16] http://www.lazneteplice.cz/jako-prvni-v-cesku-zahajujeme-robotickou-rehabilit/
[18] http://www.exos.ir/1394/01/
[19] http://www.armadninoviny.cz/vyvoj-robotickych-protez-pokracuje-milovymi-kroky.html
[20] http://technet.idnes.cz/proteza-darpa-luke-0n6-/veda.aspx?c=A150215_234930_veda_pka
[23] http://www.uvn.cz/index.php?option=com_content&view=article&id=838&Itemid=566